Publications
2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)
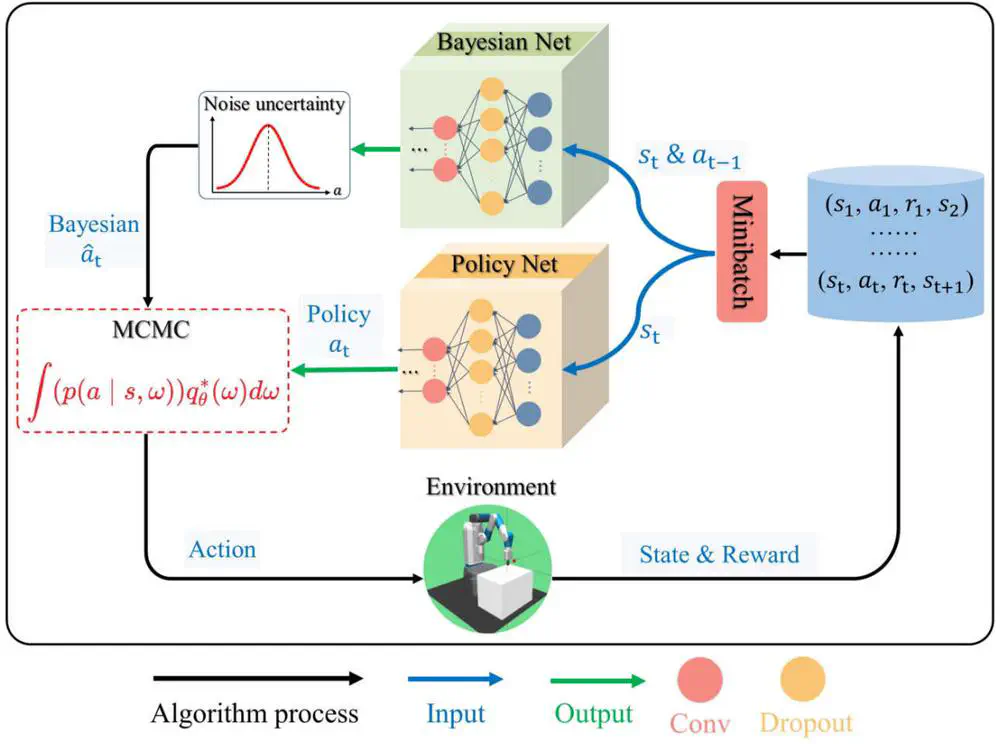
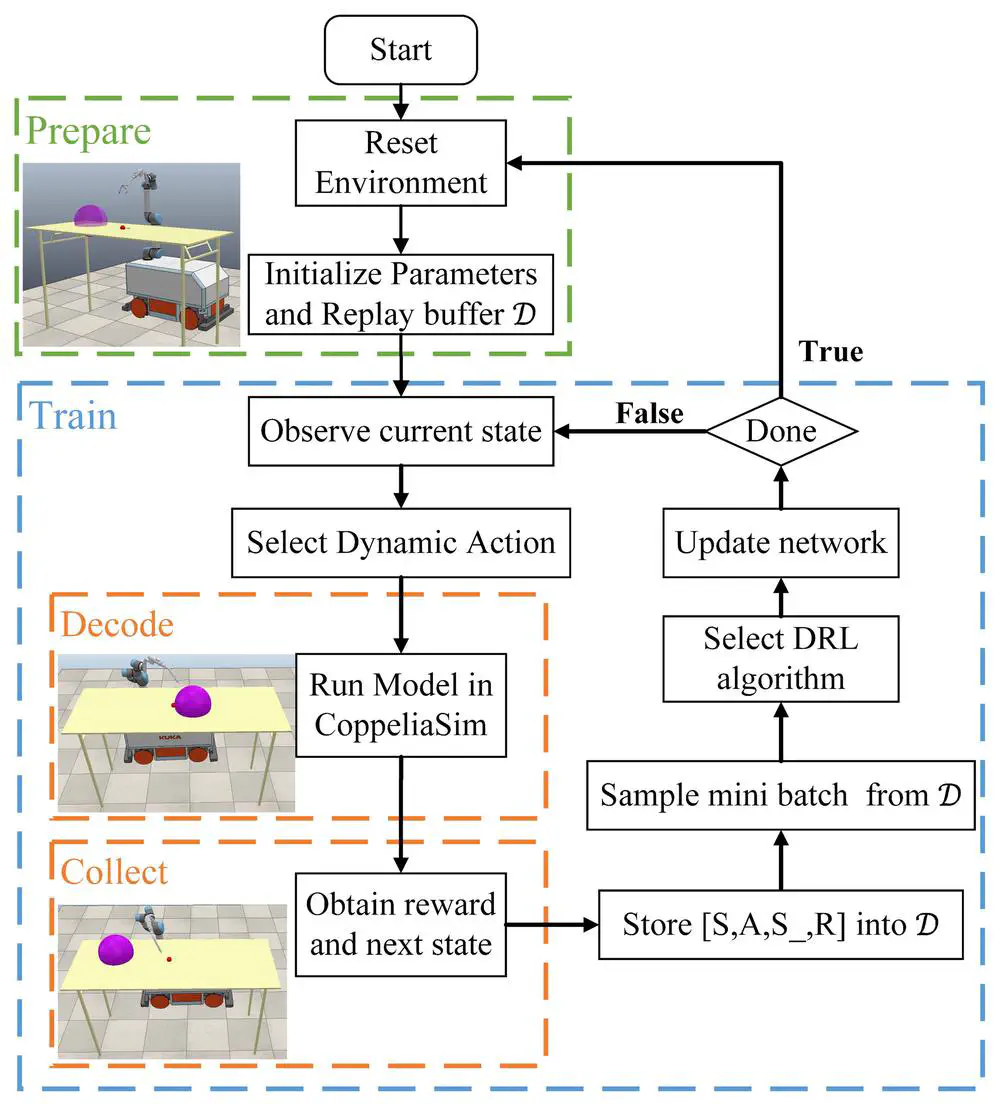
We propose a Bayesian deep reinforcement learning (BDRL) framework to address uncertainty in robot manipulation tasks with sparse rewards, significantly improving convergence speed.